Qixian Wang
Email: qixianw2@illinois.edu
CV
I am an incoming PhD student at College of Engineering, University of Illinois at Urbana-Champaign, supervised by Professor Mattia Gazzola. I received my Bachelor's degree from Ocean College, Zhejiang University in 2024, under the supervision of Prof. Zheng Chen.
I also served as a visiting student at Georgia Institute of Technology in 2023, supervised by Prof. Ye Zhao. And I worked as a research assistant in Shandong University from 2020 to 2022, under the guidance of Prof. Yudong Xie.
My research focuses on computing, soft robotics, robotics design and automation.
Publications
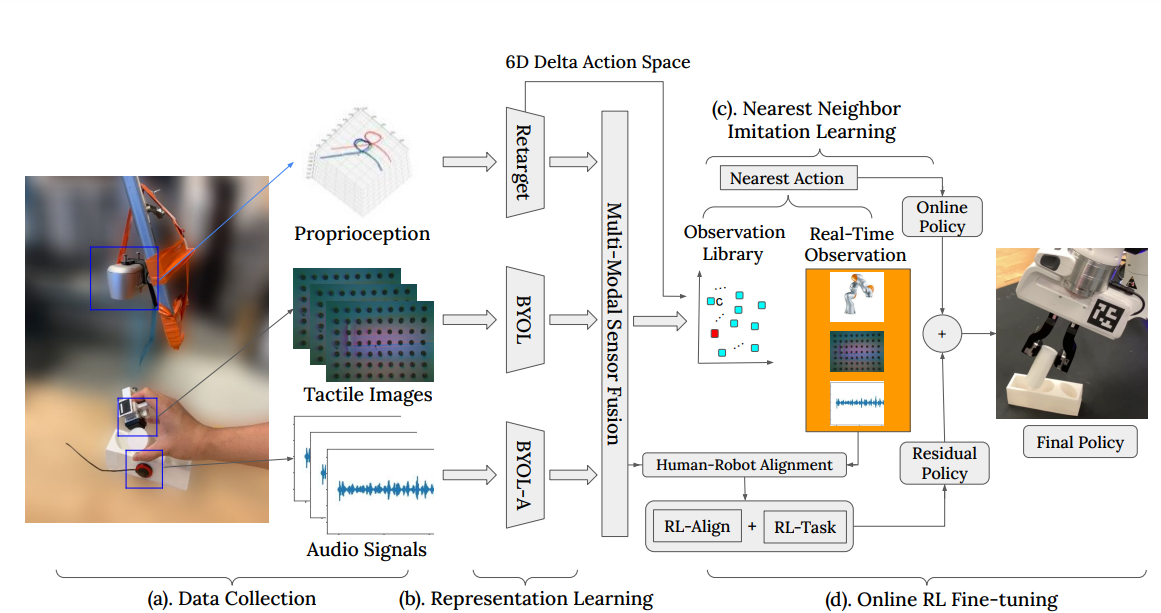
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu,
Yunhai Han,
Qixian Wang,
Vaibhav Saxena,
Danfei Xu,
Ye Zhao
Submitted to The Conference on Robot Learning (CoRL)
Tactile sensing is crucial for fine-grained, contact-rich tasks like insertion and assembly. Prior research has explored learning tactile-guided policies from teleoperated demonstrations. However, these demonstrations often rely on visual feedback, creating a gap between visual control and tactile interest. To address this, we introduce "MimicTouch," a framework for learning policies directly from human hand demonstrations. Key innovations include: i) a system to collect multimodal tactile data for learning human tactile-guided control strategies, ii) an imitation learning framework for these strategies, and iii) an online residual RL framework to bridge the gap between human hands and robot grippers.
Adaptive Robust Control of Multi-DOF Hydraulic Manipulator with Precise Online Load Estimation
Qixian Wang*,
Manzhi Qi*,
Yangxiu Xia,
Shizhao Zhou,
Zheng Chen
Chinese Journal of Mechanical Engineering (Accepted) /
Paper
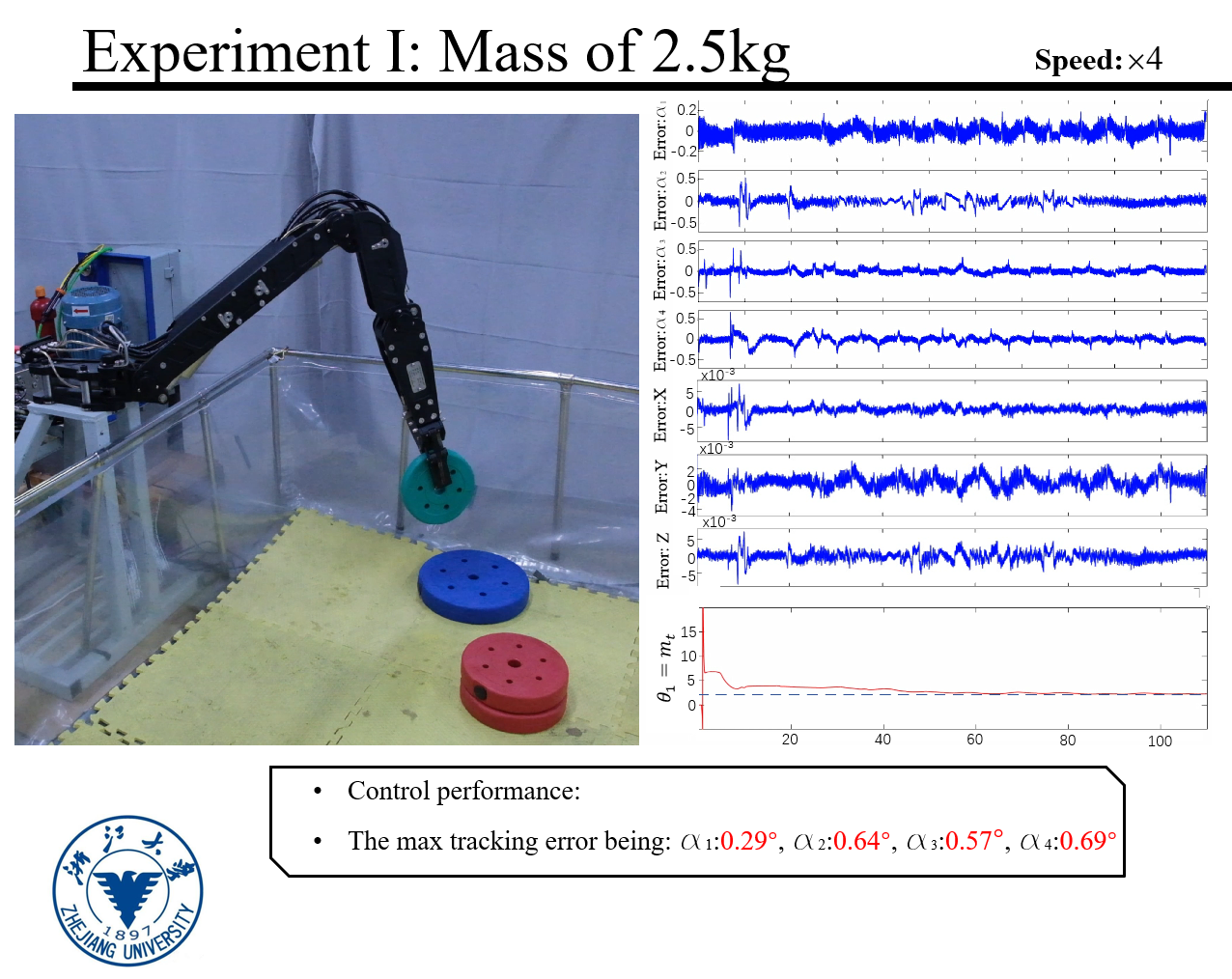
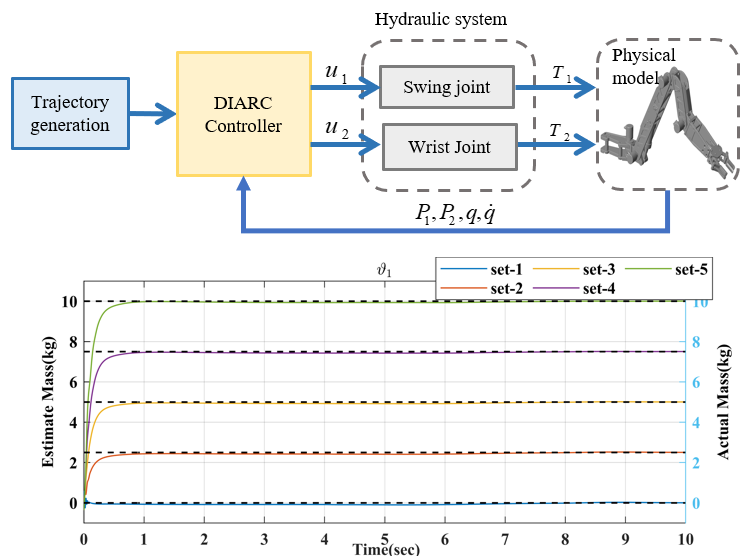
In this paper, a new load estimation method based on direct/indirect adaptive robust controller (DIARC) is proposed, which uses the backstepping strategy to cope with the high-order nonlinearity, and parameter adaptation method is applied to overcome the uncertainties which are incorporated into parametric space. Unknown load mass is included in the parametric space to realize its accurate estimation, and recursive least square adaptive law is adopted to estimate unknown parameters. Accurately estimated load mass can be further introduced into the controller to achieve better control performance. The performance of the controller is analyzed and tested on a four-degree-of-freedom hydraulic manipulator.
Precision Control and Simulation Verification of Hydraulic Manipulator under Unknown Load
Qixian Wang*,
Manzhi Qi*,
Yangxiu Xia,
Zheng Chen
The 16th International Conference on Intelligent Robotics and Applications (ICIRA), Oral Presentation /
Paper
In this paper, a direct/indirect adaptive robust controller is developed. By incorporating nonlinear and uncertain terms into the dynamic modeling, the control accuracy can be improved. In addition, the end load of the manipulator is incorporated into the parameter space, which makes end load estimation possible. Simulation is constructed using MATLAB Simscape and the performance of the controller is attested. Results shows that the controller can not only improve the tracking accuracy when the end load is heavy, but precisely identify the mass of end load precisely.
Effects of unsteady stream on hydrodynamic behavior of flexible hydrofoil in semi-passive mode
Yubing Zhang*,
Qixian Wang*,
Jiazhen Han,
Yudong Xie
Renewable Energy /
Paper
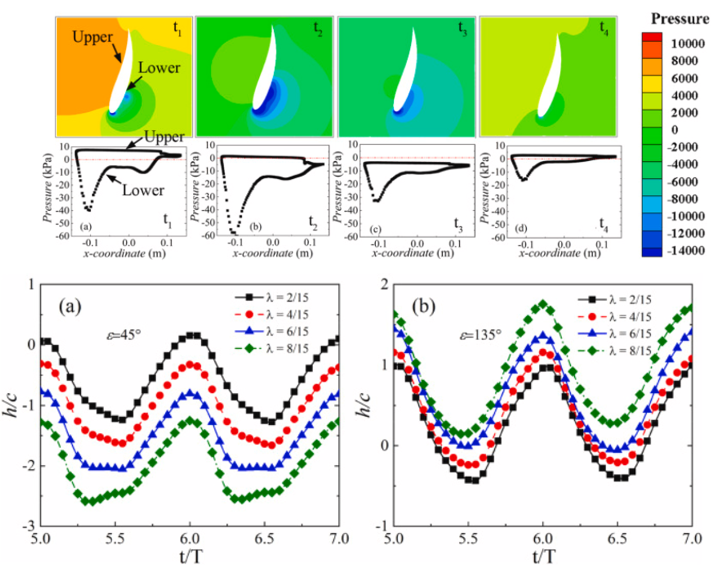
The effects of unsteady stream on the hydrodynamic behavior of a flexible hydrofoil in the semi-passive mode are investigated in this study with the goal of improving power extraction. Through comprehensive adjusting frequency ratio and phase difference according to flow velocity amplitude, the hydrofoil encounters minimum incoming flow near the dead point. This is the key to improve power extraction.
Investigation on unstable fluid load compensation of a diverged flow poppet valve
Jiazhen Han,
Yudong Xie,
Yong Wang,
Qixian Wang,
Yubing Zhang,
Jinyong Ju,
Xinbiao Zhang,
Zihan Pan
Energy Reports/
Paper
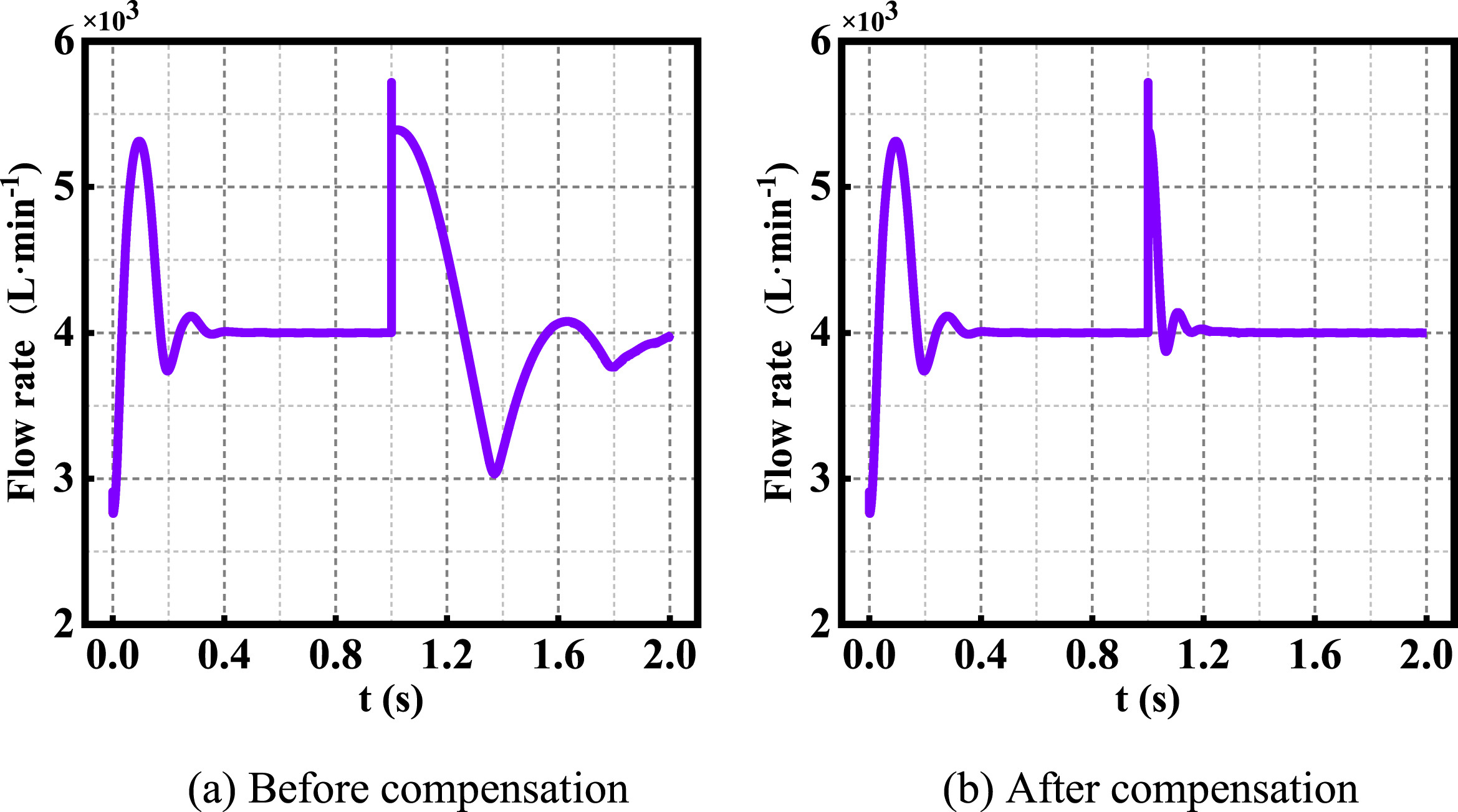
This paper proposes an effective methodology to decrease the unstable fluid load on the plug of a poppet valve. The aim is to minimize the impact of the sudden fluid load on the control performance and reduce the failure rate of the valve by compensating the output torque of the actuator in real time. The total load superimposed with the unstable fluid load acting on the plug was derived and the relationship among the fluid load, flow parameters and plug displacement was established. Based on the principle of the current loop in the control system of the permanent magnet synchronous motor, the method and strategy of compensating the maximum output torque of the actuator on demand were presented. The co-simulation model of the poppet valve system and load compensation module was built applying AMESim and Matlab/Simulink, and the compensation effect of the valve under sudden change conditions was analyzed.
Effect of Foil Thickness on the Hydrodynamic Behavior of a Self-Sustained Oscillating Foil System
Qixian Wang,
Penglei Ma,
Yudong Xie,
The 2nd International Conference on Robotics, Control and Automation Engineering/
Paper
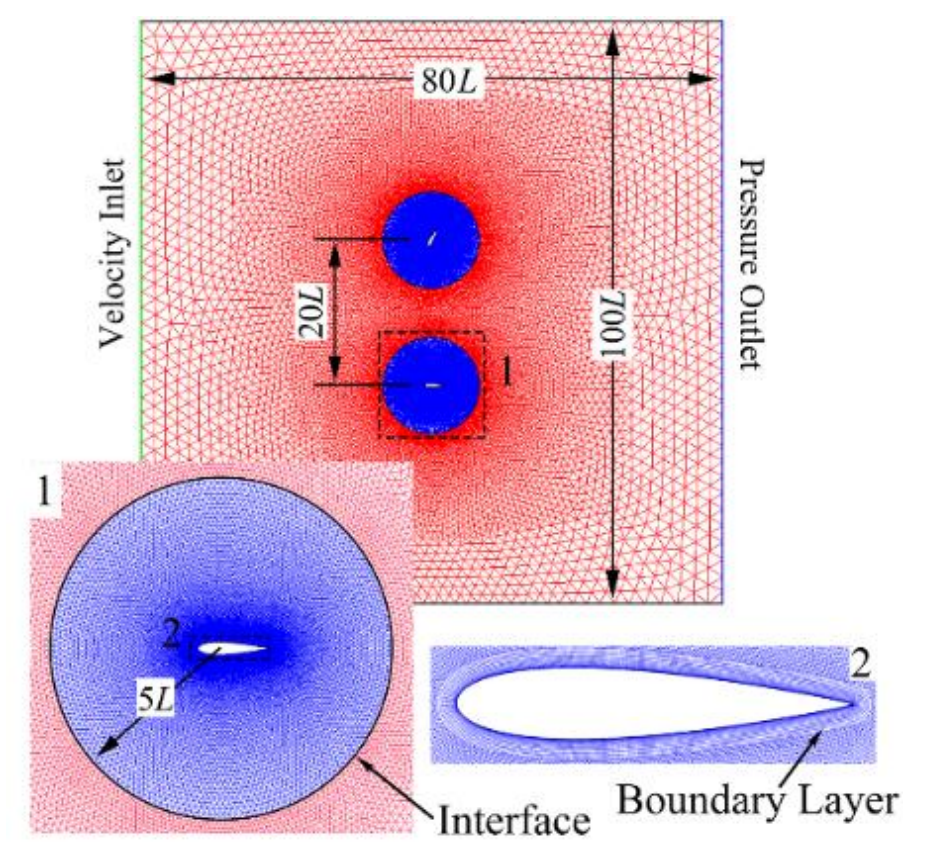
In this study, the effects of foil thickness on the system response are examined by using a 2D numerical approach. Two foils have almost the same heaving response for the symmetric foil. A thinner foil has a poor hydrodynamic performance because it occurs dynamic stall more
easily. A thicker foil can’t get a large lift force because no leading edge vortex which plays an important role in the hydrodynamic forms on the foil surface.
Research Projects
Bipedal locomotion foot design, control and contact sensing
Undergraduate Graduation Project
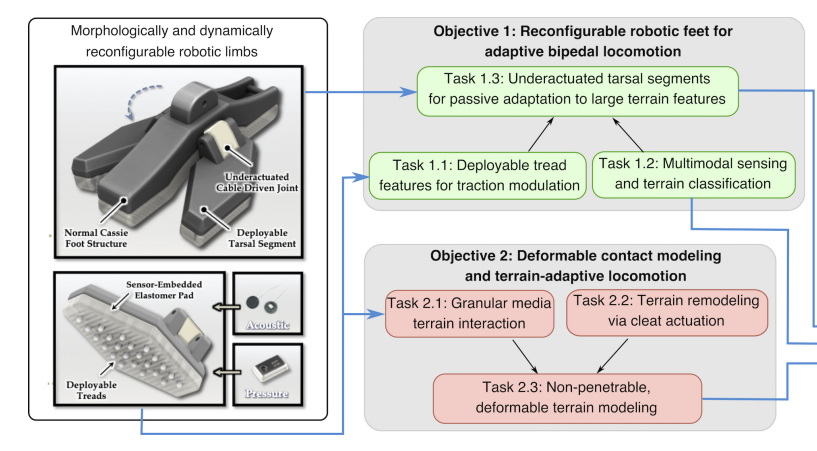
An adaptive robot foot design inspired by goat feet is proposed to enhance robotic motion on diverse terrains. The design features two large tarsal segments and ten needles for optimal contact efficiency and stability. Additionally, a new tactile sensor design ensures high-precision perception at reduced costs. The study also introduces a terrain recognition algorithm based on multi-sensor fusion, using machine learning to predict ground types and aid future gait planning.
A fish-tail style marine energy generator
Qixian Wang
Published Chinese Patent Application
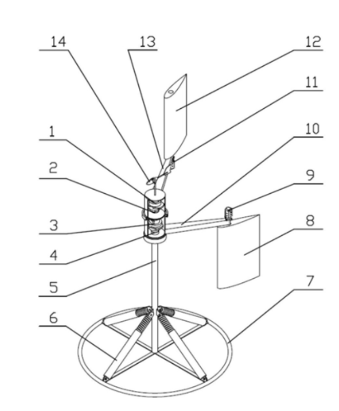
This invention discloses a fish-tail style tidal energy generator, addressing the issue that existing tidal energy devices are not effectively suitable for nearshore shallow waters. It offers the advantages of a large sweeping area and high power generation efficiency. In this invention, the oscillating motion of the hydrofoil is a coupled movement consisting of the horizontal swing of the crossarm and the swing of the hydrofoil. The hydrofoil oscillates left and right under the action of the water flow, converting the kinetic energy of the water flow into the mechanical energy of the crossarm's left and right oscillations. This enables the capture of tidal energy, making it more suitable for tidal power generation in nearshore shallow waters.
Competitions
Zhejiang University Underwater Robot Competition
Underwater Robot Design and Validation
Qixian Wang,
Shuda Lu,
Jiming Wu
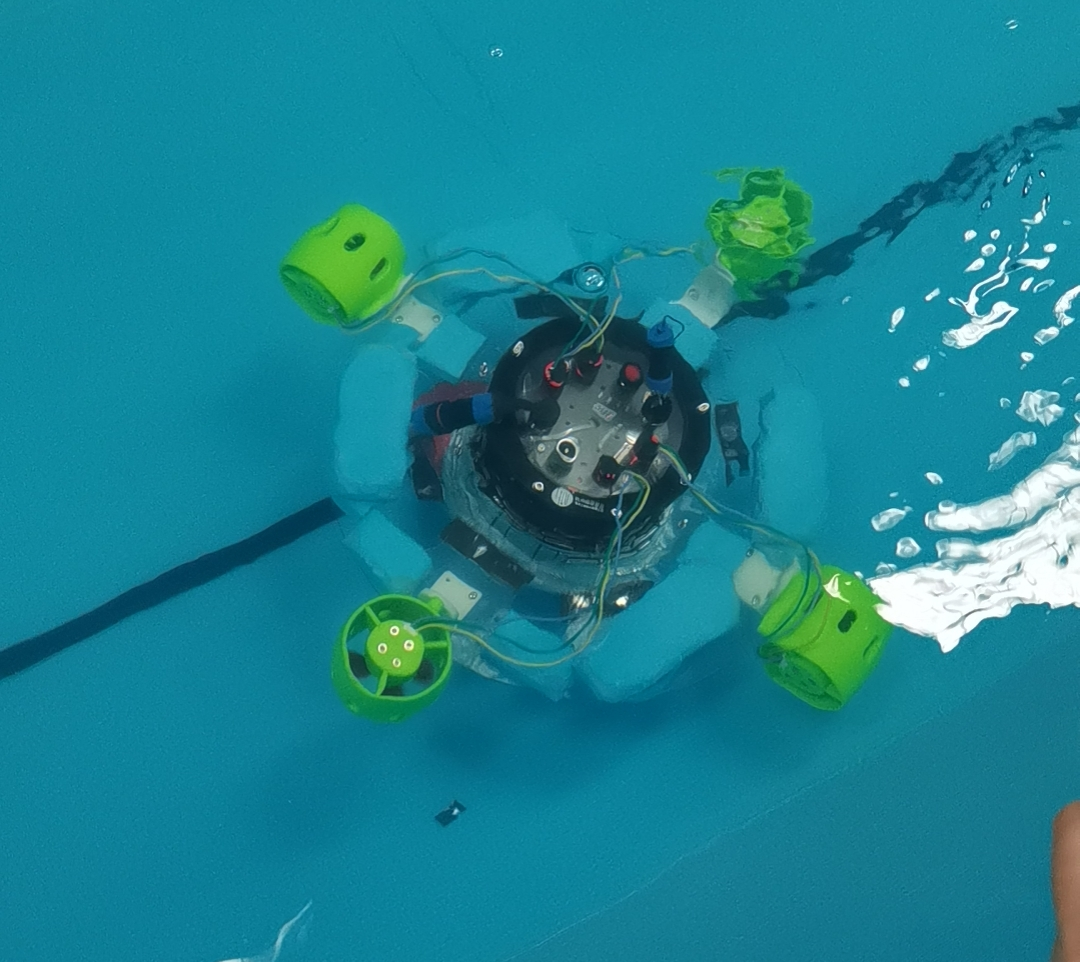
Participated in the design and manufacturing of an underwater robot. The main chips used were STM32 and Raspberry Pi, which utilized vision and PID control algorithms for path tracking and depth control. Additionally, the robot performs underwater object detection through color and shape recognition.
Zhejiang Province Marine Innovation Competition
Design of a new type of Savonius marine energy generator
Qixian Wang,
Manzhi Qi,
Weiyi Liu,
Shuda Lu,
Xizeng Zhao
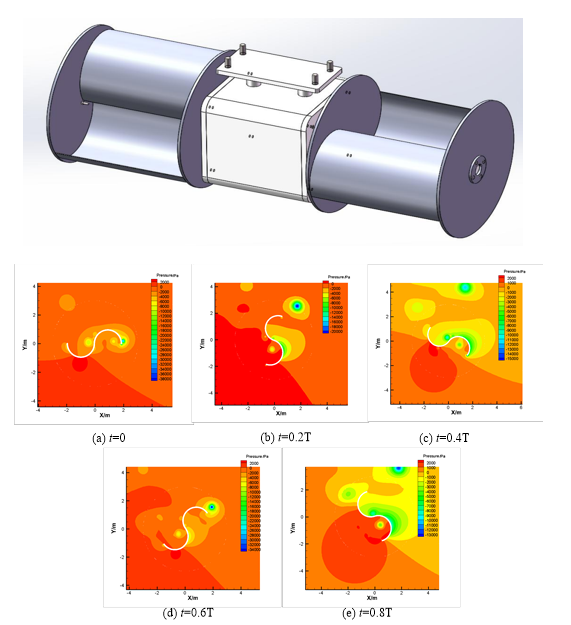
I created a marine energy generator using Savonius-type blades that can harness both wave and tidal energy. The generator consists of two sets of Savonius blades installed coaxially, 180 degrees opposite to each other. Both the stator and rotor of the generator can rotate. Each set of blades is connected to either the stator or the rotor of the generator, rotating in opposite directions to achieve acceleration. This device is not affected by the direction of seawater flow and can work bidirectionally.
Teaching Experience
Awards and Scholarships
Provincial Outstanding Graduate ,
Jun. 2024
China Harbor First Class Scholarship, China Harbour Engineering Company (CHEC) ,
Nov. 2022
Second prize scholarship of Zhejiang University, Zhejiang University,
Oct. 2021, Oct. 2022, Oct. 2023
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu, Yunhai Han, Qixian Wang, Vaibhav Saxena, Danfei Xu, Ye Zhao
Submitted to The Conference on Robot Learning (CoRL)
Tactile sensing is crucial for fine-grained, contact-rich tasks like insertion and assembly. Prior research has explored learning tactile-guided policies from teleoperated demonstrations. However, these demonstrations often rely on visual feedback, creating a gap between visual control and tactile interest. To address this, we introduce "MimicTouch," a framework for learning policies directly from human hand demonstrations. Key innovations include: i) a system to collect multimodal tactile data for learning human tactile-guided control strategies, ii) an imitation learning framework for these strategies, and iii) an online residual RL framework to bridge the gap between human hands and robot grippers.
Adaptive Robust Control of Multi-DOF Hydraulic Manipulator with Precise Online Load Estimation
Qixian Wang*, Manzhi Qi*, Yangxiu Xia, Shizhao Zhou, Zheng Chen
Chinese Journal of Mechanical Engineering (Accepted) / Paper
In this paper, a new load estimation method based on direct/indirect adaptive robust controller (DIARC) is proposed, which uses the backstepping strategy to cope with the high-order nonlinearity, and parameter adaptation method is applied to overcome the uncertainties which are incorporated into parametric space. Unknown load mass is included in the parametric space to realize its accurate estimation, and recursive least square adaptive law is adopted to estimate unknown parameters. Accurately estimated load mass can be further introduced into the controller to achieve better control performance. The performance of the controller is analyzed and tested on a four-degree-of-freedom hydraulic manipulator.
Precision Control and Simulation Verification of Hydraulic Manipulator under Unknown Load
Qixian Wang*, Manzhi Qi*, Yangxiu Xia, Zheng Chen
The 16th International Conference on Intelligent Robotics and Applications (ICIRA), Oral Presentation / Paper
In this paper, a direct/indirect adaptive robust controller is developed. By incorporating nonlinear and uncertain terms into the dynamic modeling, the control accuracy can be improved. In addition, the end load of the manipulator is incorporated into the parameter space, which makes end load estimation possible. Simulation is constructed using MATLAB Simscape and the performance of the controller is attested. Results shows that the controller can not only improve the tracking accuracy when the end load is heavy, but precisely identify the mass of end load precisely.
Effects of unsteady stream on hydrodynamic behavior of flexible hydrofoil in semi-passive mode
Yubing Zhang*, Qixian Wang*, Jiazhen Han, Yudong Xie
Renewable Energy /
Paper
The effects of unsteady stream on the hydrodynamic behavior of a flexible hydrofoil in the semi-passive mode are investigated in this study with the goal of improving power extraction. Through comprehensive adjusting frequency ratio and phase difference according to flow velocity amplitude, the hydrofoil encounters minimum incoming flow near the dead point. This is the key to improve power extraction.
Investigation on unstable fluid load compensation of a diverged flow poppet valve
Jiazhen Han, Yudong Xie, Yong Wang, Qixian Wang, Yubing Zhang, Jinyong Ju, Xinbiao Zhang, Zihan Pan
Energy Reports/
Paper
This paper proposes an effective methodology to decrease the unstable fluid load on the plug of a poppet valve. The aim is to minimize the impact of the sudden fluid load on the control performance and reduce the failure rate of the valve by compensating the output torque of the actuator in real time. The total load superimposed with the unstable fluid load acting on the plug was derived and the relationship among the fluid load, flow parameters and plug displacement was established. Based on the principle of the current loop in the control system of the permanent magnet synchronous motor, the method and strategy of compensating the maximum output torque of the actuator on demand were presented. The co-simulation model of the poppet valve system and load compensation module was built applying AMESim and Matlab/Simulink, and the compensation effect of the valve under sudden change conditions was analyzed.
Effect of Foil Thickness on the Hydrodynamic Behavior of a Self-Sustained Oscillating Foil System
Qixian Wang, Penglei Ma, Yudong Xie,
The 2nd International Conference on Robotics, Control and Automation Engineering/
Paper
In this study, the effects of foil thickness on the system response are examined by using a 2D numerical approach. Two foils have almost the same heaving response for the symmetric foil. A thinner foil has a poor hydrodynamic performance because it occurs dynamic stall more
easily. A thicker foil can’t get a large lift force because no leading edge vortex which plays an important role in the hydrodynamic forms on the foil surface.
Research Projects
Bipedal locomotion foot design, control and contact sensing
Undergraduate Graduation Project
An adaptive robot foot design inspired by goat feet is proposed to enhance robotic motion on diverse terrains. The design features two large tarsal segments and ten needles for optimal contact efficiency and stability. Additionally, a new tactile sensor design ensures high-precision perception at reduced costs. The study also introduces a terrain recognition algorithm based on multi-sensor fusion, using machine learning to predict ground types and aid future gait planning.
A fish-tail style marine energy generator
Qixian Wang
Published Chinese Patent Application
This invention discloses a fish-tail style tidal energy generator, addressing the issue that existing tidal energy devices are not effectively suitable for nearshore shallow waters. It offers the advantages of a large sweeping area and high power generation efficiency. In this invention, the oscillating motion of the hydrofoil is a coupled movement consisting of the horizontal swing of the crossarm and the swing of the hydrofoil. The hydrofoil oscillates left and right under the action of the water flow, converting the kinetic energy of the water flow into the mechanical energy of the crossarm's left and right oscillations. This enables the capture of tidal energy, making it more suitable for tidal power generation in nearshore shallow waters.
Competitions
Zhejiang University Underwater Robot Competition
Underwater Robot Design and Validation
Qixian Wang,
Shuda Lu,
Jiming Wu
Participated in the design and manufacturing of an underwater robot. The main chips used were STM32 and Raspberry Pi, which utilized vision and PID control algorithms for path tracking and depth control. Additionally, the robot performs underwater object detection through color and shape recognition.
Zhejiang Province Marine Innovation Competition
Design of a new type of Savonius marine energy generator
Qixian Wang,
Manzhi Qi,
Weiyi Liu,
Shuda Lu,
Xizeng Zhao
I created a marine energy generator using Savonius-type blades that can harness both wave and tidal energy. The generator consists of two sets of Savonius blades installed coaxially, 180 degrees opposite to each other. Both the stator and rotor of the generator can rotate. Each set of blades is connected to either the stator or the rotor of the generator, rotating in opposite directions to achieve acceleration. This device is not affected by the direction of seawater flow and can work bidirectionally.
Teaching Experience
Awards and Scholarships
Provincial Outstanding Graduate ,
Jun. 2024
China Harbor First Class Scholarship, China Harbour Engineering Company (CHEC) ,
Nov. 2022
Second prize scholarship of Zhejiang University, Zhejiang University,
Oct. 2021, Oct. 2022, Oct. 2023
Bipedal locomotion foot design, control and contact sensing
Undergraduate Graduation Project
An adaptive robot foot design inspired by goat feet is proposed to enhance robotic motion on diverse terrains. The design features two large tarsal segments and ten needles for optimal contact efficiency and stability. Additionally, a new tactile sensor design ensures high-precision perception at reduced costs. The study also introduces a terrain recognition algorithm based on multi-sensor fusion, using machine learning to predict ground types and aid future gait planning.
A fish-tail style marine energy generator
Qixian Wang
Published Chinese Patent Application
This invention discloses a fish-tail style tidal energy generator, addressing the issue that existing tidal energy devices are not effectively suitable for nearshore shallow waters. It offers the advantages of a large sweeping area and high power generation efficiency. In this invention, the oscillating motion of the hydrofoil is a coupled movement consisting of the horizontal swing of the crossarm and the swing of the hydrofoil. The hydrofoil oscillates left and right under the action of the water flow, converting the kinetic energy of the water flow into the mechanical energy of the crossarm's left and right oscillations. This enables the capture of tidal energy, making it more suitable for tidal power generation in nearshore shallow waters.
Zhejiang University Underwater Robot Competition
Underwater Robot Design and Validation
Qixian Wang, Shuda Lu, Jiming Wu
Participated in the design and manufacturing of an underwater robot. The main chips used were STM32 and Raspberry Pi, which utilized vision and PID control algorithms for path tracking and depth control. Additionally, the robot performs underwater object detection through color and shape recognition.
Zhejiang Province Marine Innovation Competition
Design of a new type of Savonius marine energy generator
Qixian Wang, Manzhi Qi, Weiyi Liu, Shuda Lu, Xizeng Zhao
I created a marine energy generator using Savonius-type blades that can harness both wave and tidal energy. The generator consists of two sets of Savonius blades installed coaxially, 180 degrees opposite to each other. Both the stator and rotor of the generator can rotate. Each set of blades is connected to either the stator or the rotor of the generator, rotating in opposite directions to achieve acceleration. This device is not affected by the direction of seawater flow and can work bidirectionally.